
¿Cómo se crea una herramienta y dar de alta en el Flexpendant?
En este artí culo te vamos a explicar cómo dar de alta o crear una herramienta desde el Flexpendant.
culo te vamos a explicar cómo dar de alta o crear una herramienta desde el Flexpendant.
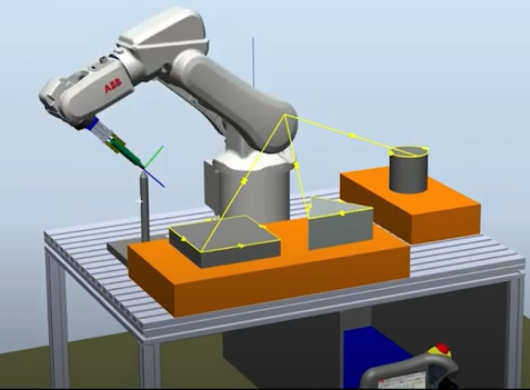
Esta es la herramienta que vamos a utilizar.
Te vamos a enseñar unos pasos muy sencillos que vas a poder seguir y crear tu herramienta, también te vamos a enseñar a utilizar la instrucción de orientación, esta instrucción te va a servir para poder mover el manipulador sin necesidad de moverse del punto.
En seguida te explicamos cómo vamos a crear el TCP. Para empezar, te daremos una breve explicación de:
¿Qué es un TCP?
Es el punto de referencia que toma el robot para hacer los movimientos que lo harán llegar a las posiciones programadas. Por defecto este punto es la herramienta 0 (Tool0) que se encuentra en el centro del plato de montaje del eje 6.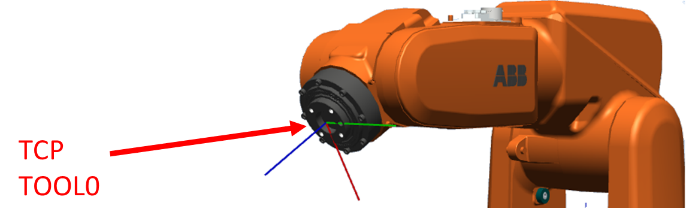
Hay tres tipos de métodos para la creación de un TCP.
- Método TCP (Orientación Default)
- Método TCP & Z (Elongación en “Z”)
- Método TCP & Z,X (Elongación en “Z” y “X”)
A continuación, vamos a mencionar la creación por Método TCP (Orientación Default)
Este punto se define realizando un mínimo de cuatro puntos de aproximación para que el robot pueda calcular la posición del nuevo TCP. Este método es aplicable cuando el punto de referencia se traslada, pero continua céntrico y con la misma orientación que el plano del disco del eje 6.
Para crear el TCP debemos montar la herramienta a usar, en este caso será un gripper. Para crear el TCP usaremos el método “default orient”, ya que la ubicación y la orientación es la misma que la del eje 6.
En seguida mencionamos cuales son los pasos para crear un TCP
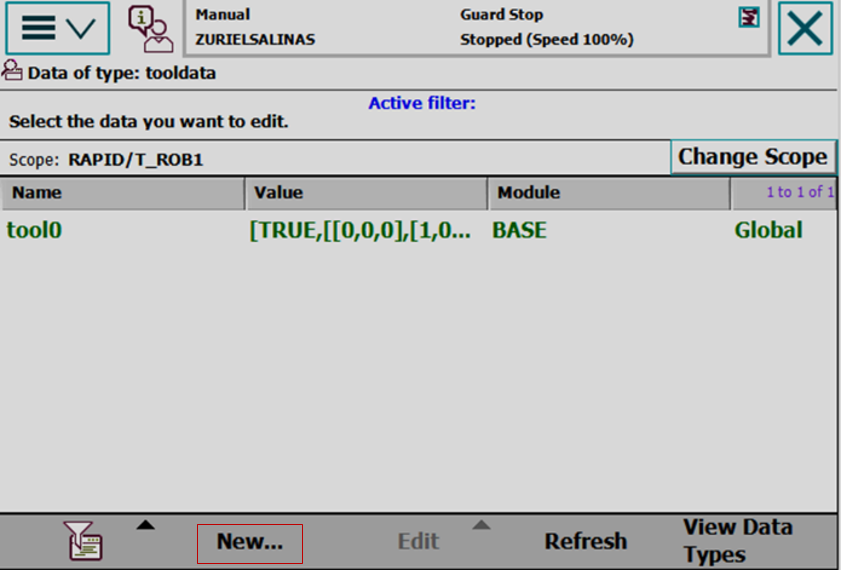
PASO 1: Damos Clic en menú -> Program Data ![]() -> tooldata ->New
-> tooldata ->New
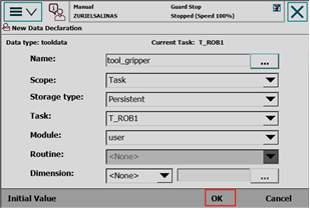
PASO 2: Le ponemos un nombre a la nueva herramienta, para terminar, presionamos OK.
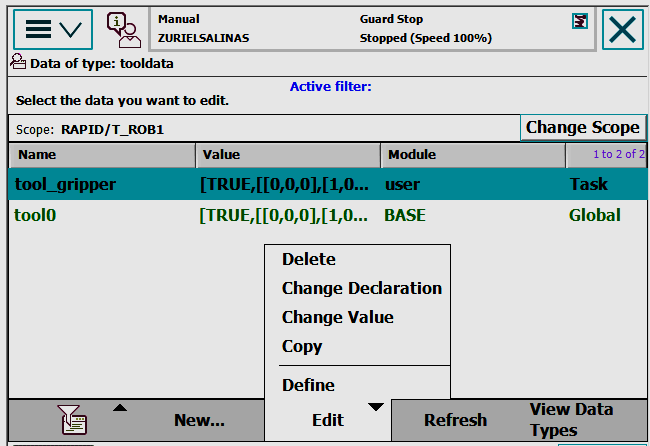
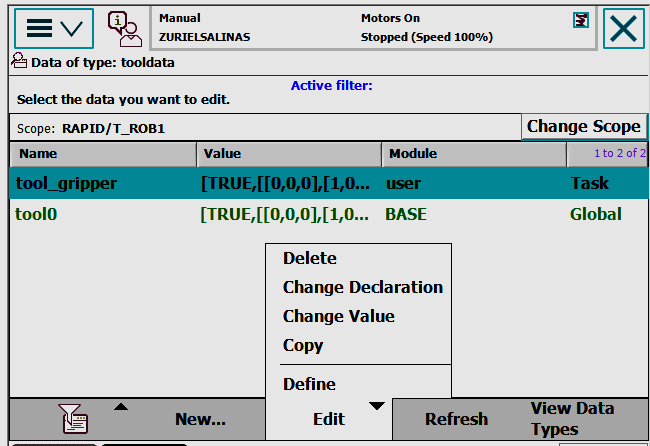
PASO 3: Seleccionamos la herramienta (tool_gripper) -> Edit -> Define.
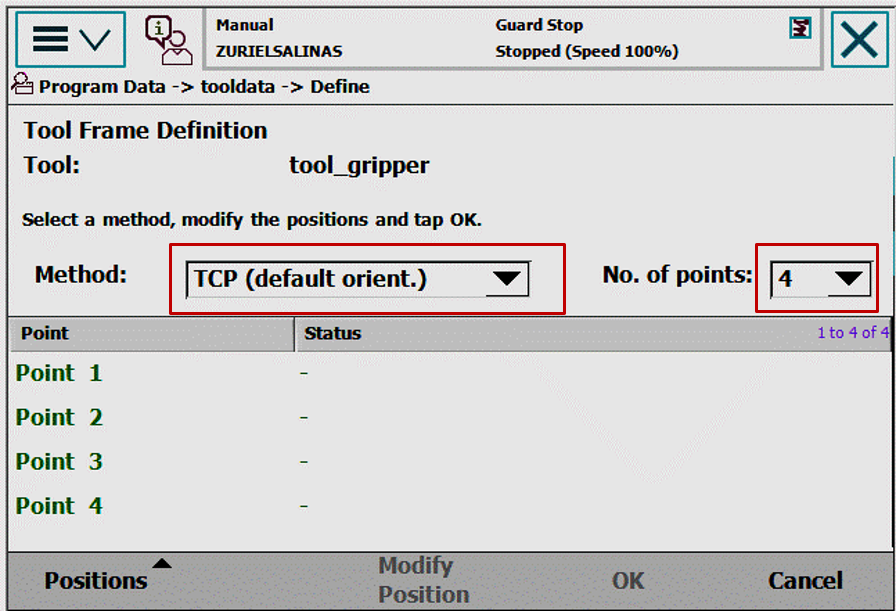
PASO 4: Seleccionamos el método para crear el TCP, en este caso seleccionamos orientación default, y el número de puntos. (4 Posiciones)
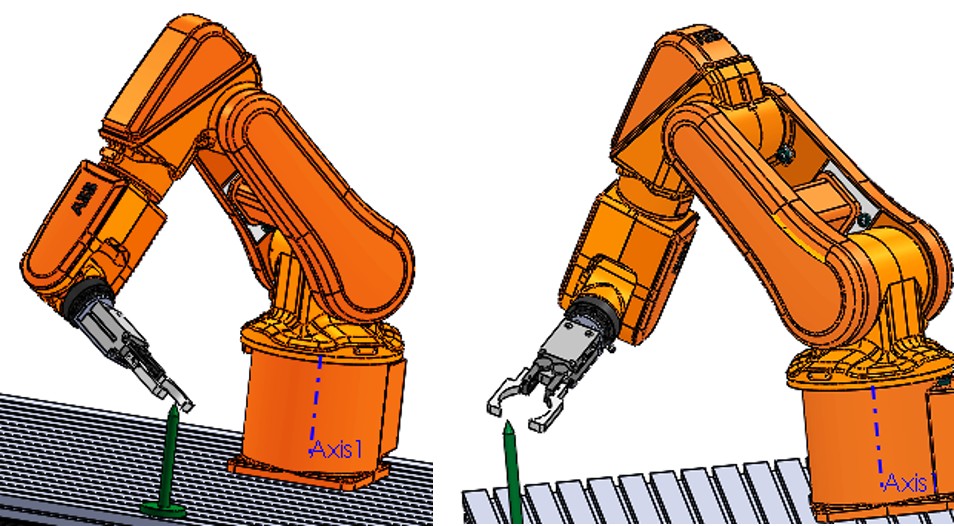
PASO 5: Coloque una punta fija al alcance del robot, en seguida acerque el TCP de su herramienta a la punta fija (lo más cerca posible). (Van a ser 4 posiciones diferentes)
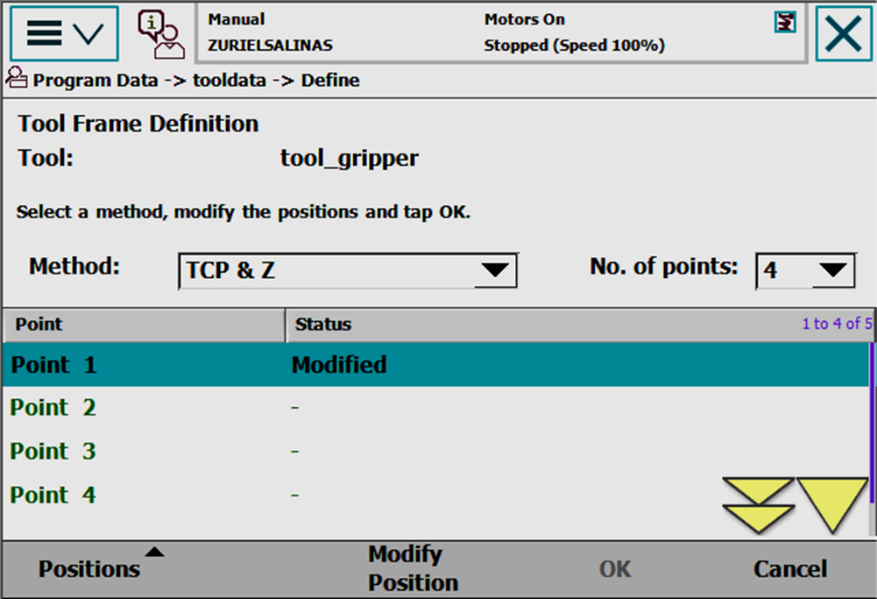
PASO 6: Seleccionamos el primer punto y posteriormente presionamos “Modify Position”. En status debe aparecer “Modified”
PASO 7: Aleje el TCP y vuelva a acercarlo a la punta, pero con orientación diferente y grabe el punto 2.
Una vez teniendo el segundo punto de orientación presionamos “Modify Position”
Se realizan los mismos puntos para crear los puntos 3 y 4
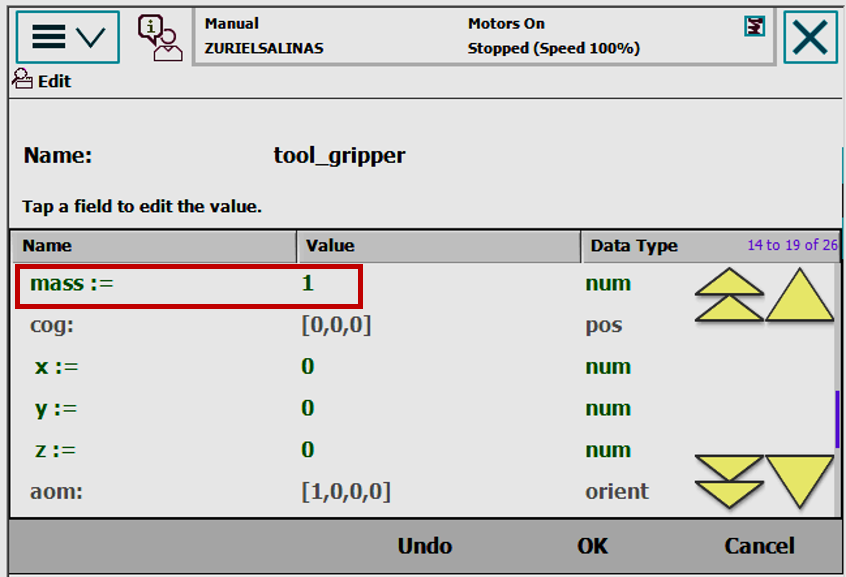
Una vez definida las 4 posiciones procedemos a configurar la masa para ello seleccione la herramienta creada (tool_gripper) -> Edit -> Change Value.
(Hace referencia a cuánto pesa la herramienta
Introducimos la masa en KG, para que el robot sepa el peso de la herramienta y no tenga ningun problema de movimiento.
Finalmente seleccione el TCP creado, Menú -> Jogging ->tool. Para finalizar clic en OK
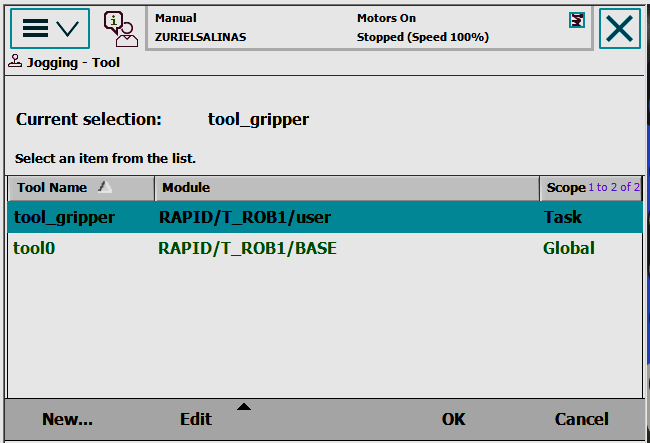
Para corroborar la precisión del TCP coloque la punta del TCP en la punta de la herramienta y desde la ventana jogging realice el movimiento de reorientación, la punta de su TCP deberá cambiar de orientación, pero sin trasladarse.
Si te queda duda sobre el articulo puedes observar el video en nuestro canal de YouTube
Clic en el siguiente enlace para ver el video.
![]() ventas@sigmaimecsa.com
ventas@sigmaimecsa.com