
¿Cómo mover un Robot Industrial?
Hola, ¿qué tal? En ese artículo te voy a explicar cómo poder mover un robot industrial. Tenemos un manipulador de la marca  ABB, un Flexpendant y el controlador, anteriormente ya te había explicado en otro artículo las partes que conforman un robot industrial, ahora te voy a explicar cómo puedo moverlo, que función tengo que saber y que tengo que saber sobre los ejes del robot.
ABB, un Flexpendant y el controlador, anteriormente ya te había explicado en otro artículo las partes que conforman un robot industrial, ahora te voy a explicar cómo puedo moverlo, que función tengo que saber y que tengo que saber sobre los ejes del robot.
 Tenemos un Flexpendant, es una unidad de operador de mano que se usa para realizar mucho las tareas implicadas en el manejo de un sistema de robot, con éste podemos mover el manipulador, o sea, poder mover el robot.
Tenemos un Flexpendant, es una unidad de operador de mano que se usa para realizar mucho las tareas implicadas en el manejo de un sistema de robot, con éste podemos mover el manipulador, o sea, poder mover el robot.
Ahora te voy a explicar las partes del Flexpendant, tenemos lo que es el paro de emergencia (A) este lo oprimes y se ejecuta lo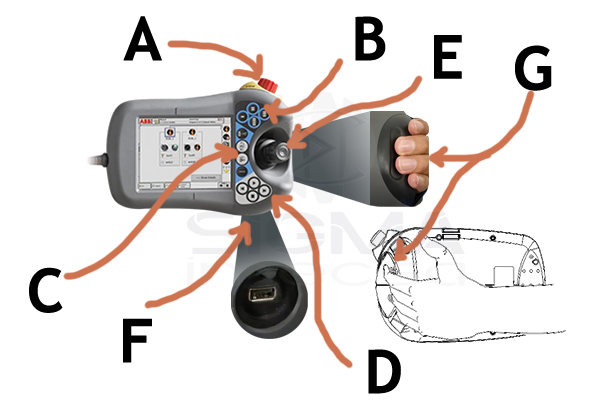 que es el paro de emergencia, también tenemos las teclas programables (B), teclas dedicadas (C) y también tenemos teclas de ejecución del programa (D), podemos iniciar el programa, detenerlo, retroceder un paso, avanzar un paso y con el joystick (E) vamos a poder lo que es mover el manipulador, éste se puede mover de izquierda a derecha y de arriba hacia abajo, también se puede girar en contra de las manecillas del reloj o a favor de las manecillas del reloj, esto es para mover lo que es el manipulador.
que es el paro de emergencia, también tenemos las teclas programables (B), teclas dedicadas (C) y también tenemos teclas de ejecución del programa (D), podemos iniciar el programa, detenerlo, retroceder un paso, avanzar un paso y con el joystick (E) vamos a poder lo que es mover el manipulador, éste se puede mover de izquierda a derecha y de arriba hacia abajo, también se puede girar en contra de las manecillas del reloj o a favor de las manecillas del reloj, esto es para mover lo que es el manipulador.
En la parte de abajo del Flexpendant está un puerto USB (F), éste se utiliza para hacer respaldos del programa del robot, también tenemos lo que es el elemento de habilitación (G), éste es un interruptor de presión con tres posiciones, el interruptor deberá estar en la posición intermedia para poder habilitar lo que son los motores del robot.
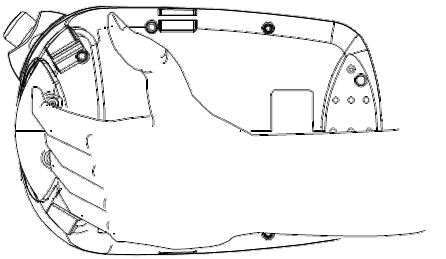 En este caso tú te lo vas a colocar sobre el brazo izquierdo y lo vas a presionar, desde la primera posición, segunda posición y si lo presionamos hasta el fondo en la tercera posición (si quieres ver el movimiento de la presión dirígete al vídeo: https://youtu.be/BBrLAOr89KY), éste para que los motores se habiliten debe estar en la segunda posición, también este botón es conocido como “dead man” en caso de que te pase algún accidente, te llega a golpear, te llegas a desmayar o desvanecerte, al momento de soltar, se deshabilita el robot o también se puede sufrir una descarga eléctrica al contrario tus músculos se contraen y puedes oprimirlo de más, esto también hace que el robot se detenga.
En este caso tú te lo vas a colocar sobre el brazo izquierdo y lo vas a presionar, desde la primera posición, segunda posición y si lo presionamos hasta el fondo en la tercera posición (si quieres ver el movimiento de la presión dirígete al vídeo: https://youtu.be/BBrLAOr89KY), éste para que los motores se habiliten debe estar en la segunda posición, también este botón es conocido como “dead man” en caso de que te pase algún accidente, te llega a golpear, te llegas a desmayar o desvanecerte, al momento de soltar, se deshabilita el robot o también se puede sufrir una descarga eléctrica al contrario tus músculos se contraen y puedes oprimirlo de más, esto también hace que el robot se detenga.
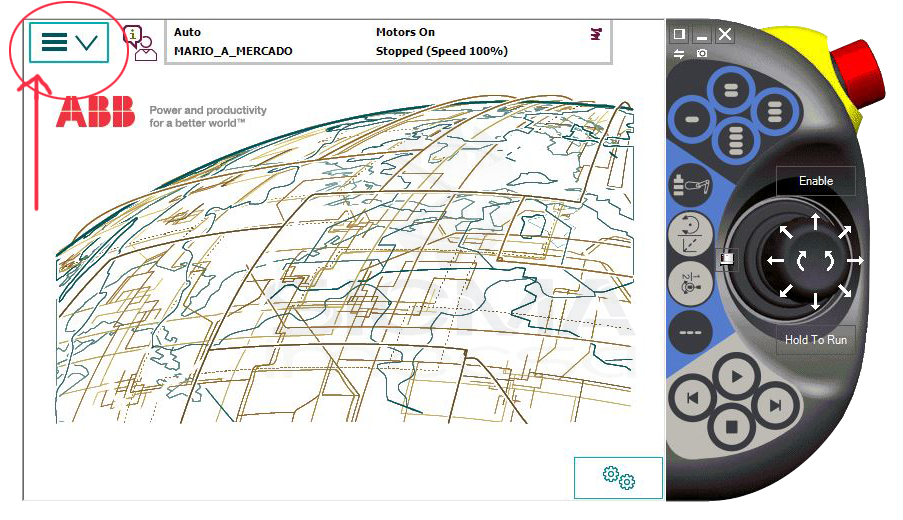
Bueno y ¿cómo voy a poder mover el robot?, para poder mover el robot tenemos que irnos 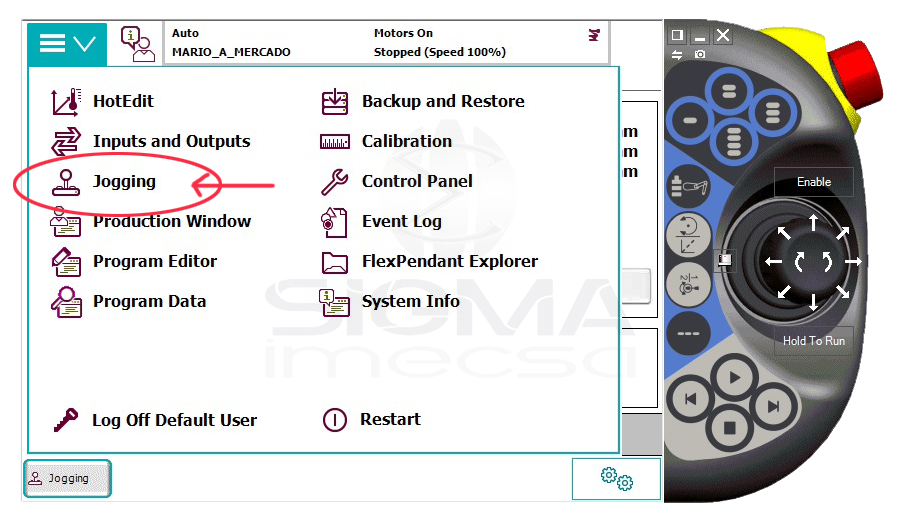 a la opción de “jogging” donde busco la opción de jogging, vamos a seleccionarlo recuerden que la pantalla es Touch y utilizamos el lápiz que viene con el Flexpendant.
a la opción de “jogging” donde busco la opción de jogging, vamos a seleccionarlo recuerden que la pantalla es Touch y utilizamos el lápiz que viene con el Flexpendant.
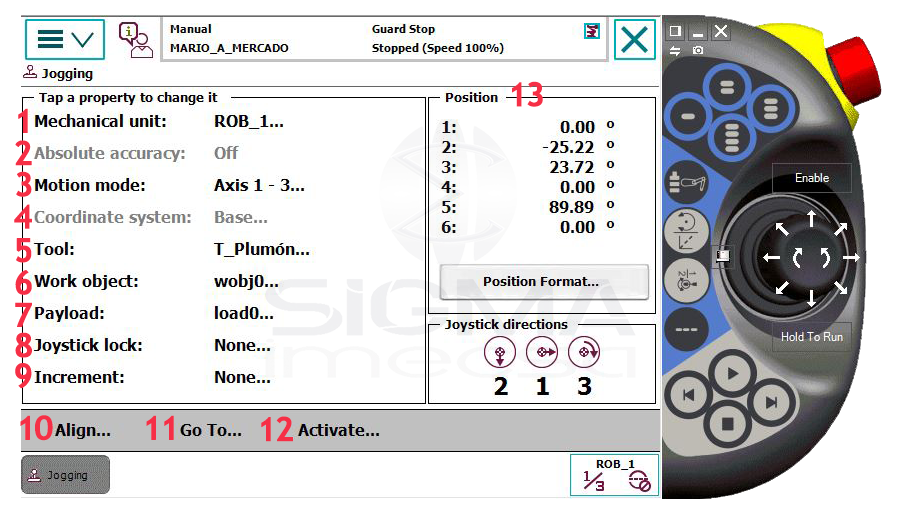
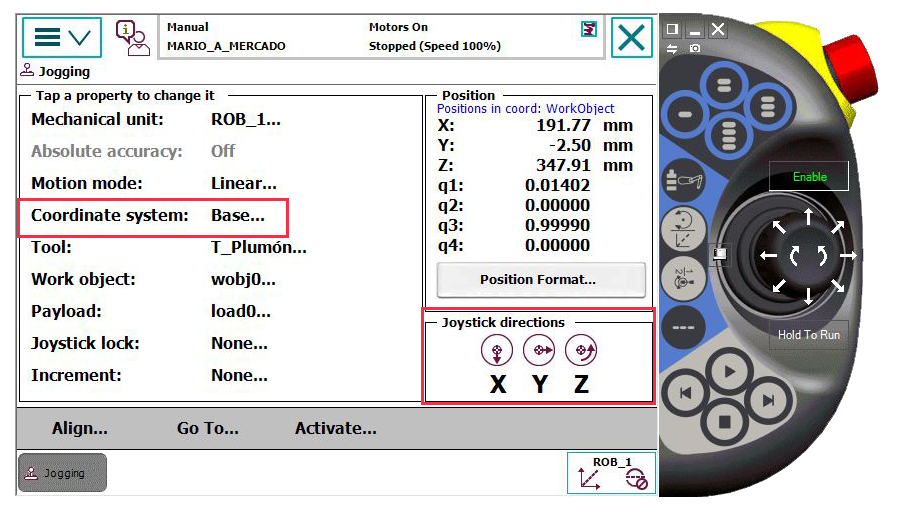
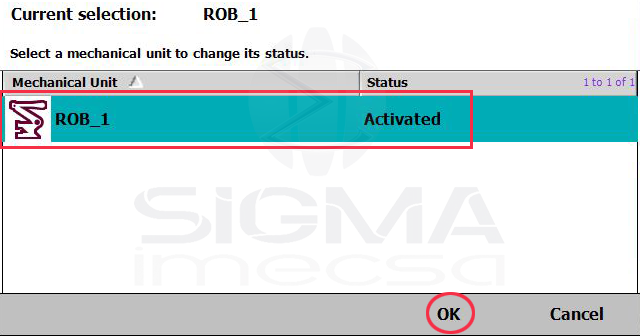 En la primera parte nos dice que es la unidad mecánica a mover (1), en este caso solamente tenemos un solo robot. El controlador puede soportar hasta 36 ejes externos. Aquí puedes ver que puede estar uno o más robots conectados al controlador, en este caso viene siendo “ROB_1”, le damos “ok” para salirnos, en el siguiente, hay una parte donde está deshabilitada es una calibración especial: “Absolute Accuracy” (2), de ahí tenemos el tipo de movimiento a realizar: “Motion
En la primera parte nos dice que es la unidad mecánica a mover (1), en este caso solamente tenemos un solo robot. El controlador puede soportar hasta 36 ejes externos. Aquí puedes ver que puede estar uno o más robots conectados al controlador, en este caso viene siendo “ROB_1”, le damos “ok” para salirnos, en el siguiente, hay una parte donde está deshabilitada es una calibración especial: “Absolute Accuracy” (2), de ahí tenemos el tipo de movimiento a realizar: “Motion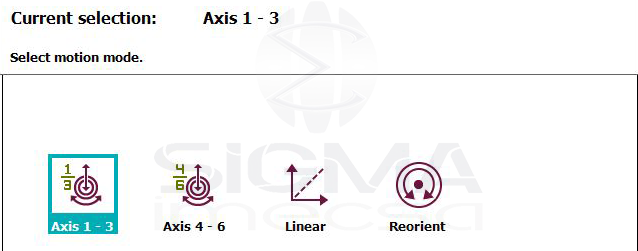 mode” (3), por ejemplo, si lo escojo: tenemos que es por “ejes”, en este caso podemos escoger: axis del 1 al 3, axis del 4 al 6, lineal y reorientación. Te voy a explicar cómo son los ejes, donde se encuentran los ejes del motor, entonces aquí solamente vamos estar moviendo del eje 1 2 y 3, del eje 4 5 y 6, lineal y reorientación vamos a dejarlo en eje del 1 al 3.
mode” (3), por ejemplo, si lo escojo: tenemos que es por “ejes”, en este caso podemos escoger: axis del 1 al 3, axis del 4 al 6, lineal y reorientación. Te voy a explicar cómo son los ejes, donde se encuentran los ejes del motor, entonces aquí solamente vamos estar moviendo del eje 1 2 y 3, del eje 4 5 y 6, lineal y reorientación vamos a dejarlo en eje del 1 al 3.
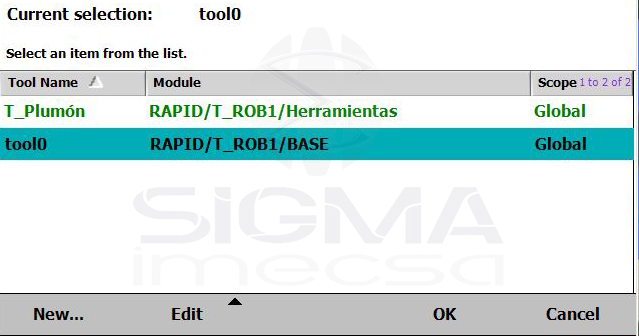 De ahí es la opción inhabilitada en este momento “Coordinate System” (4), luego está la herramienta “Tool” (5), tenemos para agregar la herramienta; por default, si no tienes agregada ninguna herramienta te va a parecer “tool 0”, se toma como referencia del plato del eje 6 del robot este bien va a venir por default; el “work object” (6), es el plano de trabajo usar, tenemos “playload” (7), son cargas adicionales en brazo, en “Joystick lock” (8), es bloqueo de respuesta en el joystick en caso de que lo quieras bloquear y por último ya tenemos los incrementos (9), configura un movimiento por pausas, si quieres que el robot se mueva por incrementos, “Align” (10), un “Go To” (11) y un “Activate” (12).
De ahí es la opción inhabilitada en este momento “Coordinate System” (4), luego está la herramienta “Tool” (5), tenemos para agregar la herramienta; por default, si no tienes agregada ninguna herramienta te va a parecer “tool 0”, se toma como referencia del plato del eje 6 del robot este bien va a venir por default; el “work object” (6), es el plano de trabajo usar, tenemos “playload” (7), son cargas adicionales en brazo, en “Joystick lock” (8), es bloqueo de respuesta en el joystick en caso de que lo quieras bloquear y por último ya tenemos los incrementos (9), configura un movimiento por pausas, si quieres que el robot se mueva por incrementos, “Align” (10), un “Go To” (11) y un “Activate” (12).
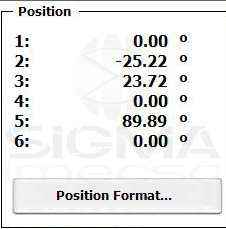
Del lado derecho tenemos la posición (13) de los ejes que se encuentra el robot actualmente, como se darán cuenta este robot tiene seis ejes.
Te voy a explicar cuáles son los ejes del robot, este manipulador tiene seis ejes.
 Tenemos el primer eje, éste es el eje número uno, tiene de -165° a +165 grados de libertad, de ahí tenemos el eje número 2, este tiene de -110° a +110 grados de libertad, tenemos el eje número 3 este tiene de – 70° a +70 grados de libertad, el eje 4 tiene 160° de libertad de -160 a +160 grados, tenemos el eje número 5, tiene 120° de libertad, de -120 a +120 grados y, por último, el eje 6 que es el plato o el disco del robot, este tiene hasta 400° de libertad de -400° hasta +400° grados.
Tenemos el primer eje, éste es el eje número uno, tiene de -165° a +165 grados de libertad, de ahí tenemos el eje número 2, este tiene de -110° a +110 grados de libertad, tenemos el eje número 3 este tiene de – 70° a +70 grados de libertad, el eje 4 tiene 160° de libertad de -160 a +160 grados, tenemos el eje número 5, tiene 120° de libertad, de -120 a +120 grados y, por último, el eje 6 que es el plato o el disco del robot, este tiene hasta 400° de libertad de -400° hasta +400° grados.
Les había mencionado que el “Tool 0” se encuentra ubicado el plato del robot, o sea, en el eje 6, omitiendo que en este caso tenemos una herramienta, aquí sería el “Tool 0”, pero es desde el plato del robot, desde el eje 6.
Vamos a mover el robot, teniendo ya listo ya el Flexpendant en la mano izquierda y presionando el botón de “dead man”.
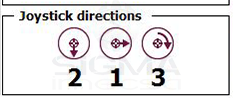 Bueno, ¿ahora cómo lo vamos a mover? dijimos que nos vamos a la ventana de jogging y ya lo tenemos en el eje o axis 1 y 3, nos dice cómo vamos a mover el joystick: si queremos mover el eje 1, el joystick vamos a moverlo a la izquierda y derecha, si queremos mover el eje 2, el joystick lo vamos a mover arriba y abajo y si queremos mover el eje 3, vamos a darle vuelta al joystick ya sea a la izquierda o a la derecha.
Bueno, ¿ahora cómo lo vamos a mover? dijimos que nos vamos a la ventana de jogging y ya lo tenemos en el eje o axis 1 y 3, nos dice cómo vamos a mover el joystick: si queremos mover el eje 1, el joystick vamos a moverlo a la izquierda y derecha, si queremos mover el eje 2, el joystick lo vamos a mover arriba y abajo y si queremos mover el eje 3, vamos a darle vuelta al joystick ya sea a la izquierda o a la derecha.
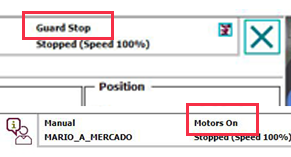
Vamos a mover el robot o manipulador en el eje 1, oprimimos el botón “dead man” y van a ver como dice en la parte superior “Guard Stop”, luego va a decir “Motors On”, en cuanto oprimimos se logra ver el cambio, vamos a realizar los movimientos y la demostración de los grados de libertad que tiene el robot, si quieres ver los movimientos dirígete al siguiente vídeo: https://youtu.be/BBrLAOr89KY los movimientos que se realizan son del eje 1 de izquierda a derecha, el eje 2 de arriba hacia abajo y el eje 3 también de arriba hacia abajo.
Ahora para mover el eje 4, 5 y 6, oprimimos el botón de “dead men” y ya se nos habilita “motors on”, nos vamos a mover el eje 4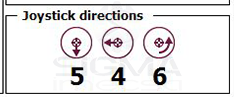 moviendo el joystick izquierda o derecha, el eje 5, el joystick se mueve de arriba hacia abajo y por último vamos a mover el eje 6 girando el joystick a las manecillas del reloj o en contra las manecillas del reloj. Si te gustaría ver los movimientos y el grado de libertad de cada eje ve el siguiente vídeo: https://youtu.be/BBrLAOr89KY
moviendo el joystick izquierda o derecha, el eje 5, el joystick se mueve de arriba hacia abajo y por último vamos a mover el eje 6 girando el joystick a las manecillas del reloj o en contra las manecillas del reloj. Si te gustaría ver los movimientos y el grado de libertad de cada eje ve el siguiente vídeo: https://youtu.be/BBrLAOr89KY
 Ahora para moverlo de modo lineal, le damos “ok” y se va a habilitar este sistema de coordenadas (4), se puede mover linealmente en “World” en “Base” en “Tool” y “Work Object”, lo vamos a dejar en base, si nosotros nos movemos en base es que vamos a agarrar de
Ahora para moverlo de modo lineal, le damos “ok” y se va a habilitar este sistema de coordenadas (4), se puede mover linealmente en “World” en “Base” en “Tool” y “Work Object”, lo vamos a dejar en base, si nosotros nos movemos en base es que vamos a agarrar de 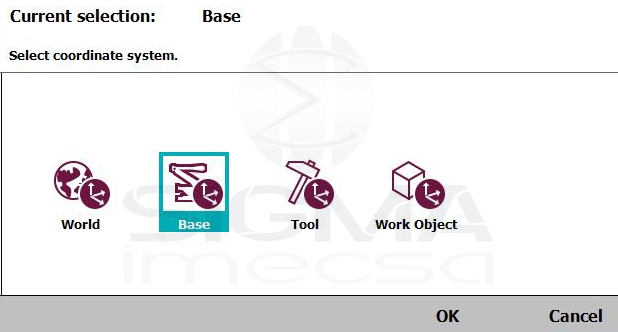 referencia los ejes “x, y, y z”, por ejemplo, vamos a mover en “x” el joystick es hacia abajo “x” positivo y “x” negativo, si lo movemos en “y” positivo y en “y” negativo y “z” negativo “z” positivo. ¿Quieres ver como se mueve el manipulador en ejes? Dirígete al siguiente link: https://youtu.be/BBrLAOr89KY
referencia los ejes “x, y, y z”, por ejemplo, vamos a mover en “x” el joystick es hacia abajo “x” positivo y “x” negativo, si lo movemos en “y” positivo y en “y” negativo y “z” negativo “z” positivo. ¿Quieres ver como se mueve el manipulador en ejes? Dirígete al siguiente link: https://youtu.be/BBrLAOr89KY
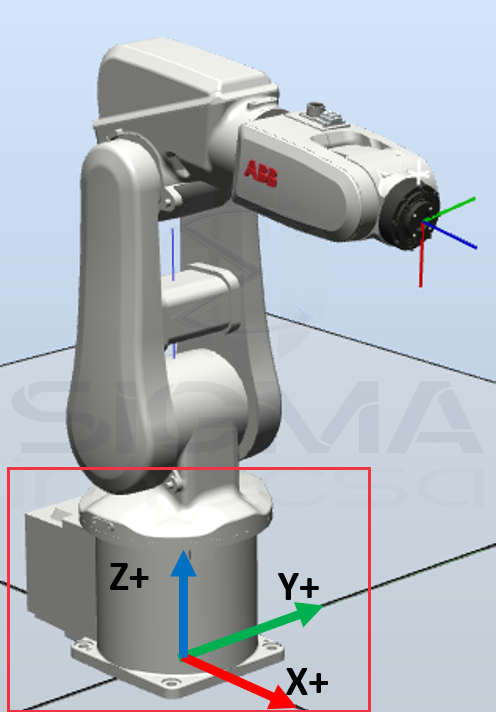 Cuando movemos en manipulador de modo lineal con respecto a base está tomando de referencia
Cuando movemos en manipulador de modo lineal con respecto a base está tomando de referencia 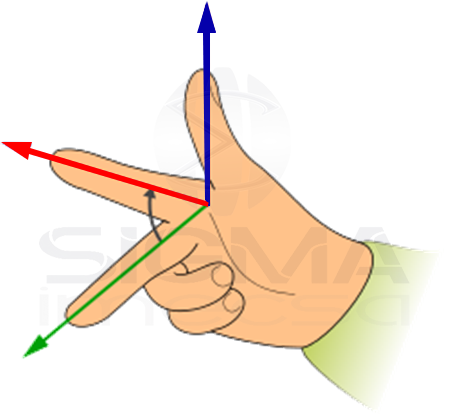 la base del motor; entonces nos vamos a apoyar de la regla en la mano derecha, aplica en la base del robot, aquí donde están conectados los cables esa es la base, vas a tomar como referencia la regla en la mano derecha: “x” positivo es hacia adelante “y” positivo es a la izquierda y “z” positivo es hacia arriba, cuando decimos “z” negativo es ahora hacia abajo, “y” negativo hacia su derecha y “x” negativo hacia atrás, a eso se refiere linealmente tipo base.
la base del motor; entonces nos vamos a apoyar de la regla en la mano derecha, aplica en la base del robot, aquí donde están conectados los cables esa es la base, vas a tomar como referencia la regla en la mano derecha: “x” positivo es hacia adelante “y” positivo es a la izquierda y “z” positivo es hacia arriba, cuando decimos “z” negativo es ahora hacia abajo, “y” negativo hacia su derecha y “x” negativo hacia atrás, a eso se refiere linealmente tipo base.
Si quieres ver el vídeo del movimiento del Robot ABB, dirígete al siguiente vídeo: https://youtu.be/BBrLAOr89KY
Si quieres descargar el archivo, clic aquí.
Síguenos en nuestras Redes Sociales:
Nos encuentras en todas como: Sigma Imecsa. Solo dale Clic.
![]() ventas@sigmaimecsa.com
ventas@sigmaimecsa.com